| Das Projekt |
| History |
| Galerie |
| Downloads |
| Impressum |
Die RobiTobi Galerie
Videos:
RobiTobi in Action (WMV geringere Bitrate, 12MB),
RobiTobi in Action (WMV höhere Bitrate, 30MB)

Der
"Deckel" des RobiTobi ist eine modifizierte Babybadewanne. Er ist
schwingend auf dem Chassis montiert, damit bei Kollisionen die Taster
ausgelöst werden.
Die Alu-Kante unten herum wurde aus einer Teppichleiste gefertigt.
 Die Räder sind preiswerte Baumarktmodelle.
Die Räder sind preiswerte Baumarktmodelle.

Ein Blick von unten mit dem Mähteller nach Husquarna Automower Vorbild.
Das Chassis ist einer von 4 Böden eines billigen Baumarktregales für 9,95 €. Sehr leicht und ausreichend stabil.
Die Räder werden mit je einem Getriebemoter RB35 1:100 angetrieben.

Das Controlpanel mit:
- Ein/Aus Schalter
- LCD Display für Statusmeldungen
- serielle Buchse zur Programmierung
- LED Statusanzeigen
-- gelb: Akkuladeanzeige
-- rot: Akku-Fehler-Anzeige
-- rot/grün: Status des Micro Controllers
-- grün: Power On

Der Mähteller wurde als Prototyp aus Blumentopfunterschalen gebaut.
Die drei Mähmesser sind gekürzte kleine Cuttermesser und schnell und einfach wechselbar.
Das Funktionsprinzip basiert auf dem von Husparna in den Automowern eingesetzten Mähtellern.
Angetrieben wird der Mähteller durch einen 12V-Motor mit 2500 U/min.

Detailansicht eines Messers (davon gibt's 3 Stück)
Ein Mähmesser ist einfach ein gekürztes Cuttermesser (die schmale
Variante), welches mit einer Schraube am Mähteller befestigt ist. Das
Messer ist drehbar (die Schraube wird nicht fest angezogen) und wird
durch die Fliehkraft beim drehenden Mähteller automatisch
herausgestellt.
Trifft das Messer auf ein Hinderniss (zB. dicker Tannenzapfen) klappt es ein und nichts passiert.
Einfacher und effizienter geht es wirklich nicht.

Der Antrieb
Die Räder werden mit je einem Getriebemoter RB35 1:100 angetrieben (Gibt's bei Conrad).
Die Räder haben je einen separaten Lagerbock mit zwei Kugellagern.
Auf den Rädern ist von innen eine Kunststoffscheibe mit 4 eingelassenen Magneten für die Odometrie mit Hallsensoren geschraubt.
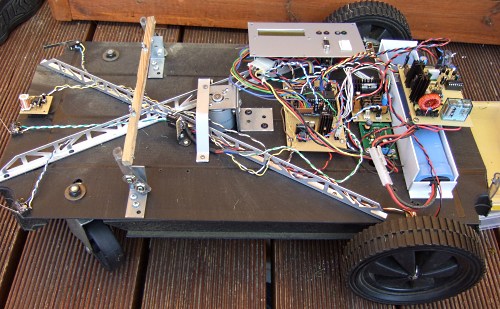
So sieht er nackig ohne Kleid aus.
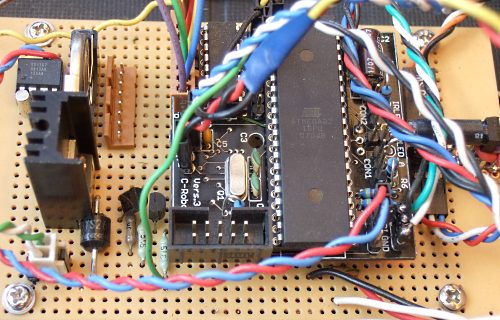
Das kleine Herz von RobiTobi. Der ATMEGA32 im Huckpack. Links vorne die Ansteuerung für den Mähmotor und links hinten die Realtime Uhr (DS1307). Die "aufgeräumte Verkabelung" lässt den Prototyp erkennen.
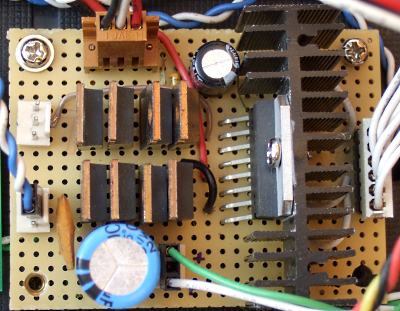
Die H-Brücke mit einem L298 für die Ansteuerung der Antriebsmotoren
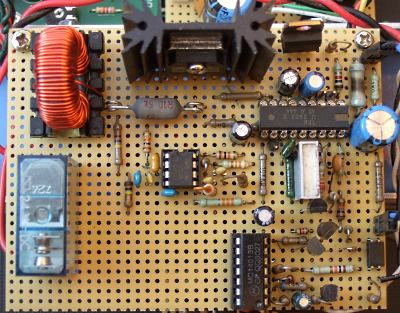
Der Ladecontroller mit dem U2402B. Der Lader wird mit dem Relais automatisch mit dem Akku verbunden, sobald die Eingangsspannung (19V) anliegt (z.B. nach dem Einparken in die Ladestation).


Ein Odometriesensor mit einem Hallsensor TLE4905L, der pro Viertelumdrehung eines Rades per 5mm Magnet (eingelassen in der Kunststoffscheibe) ein Signal abgibt. Von Odometriesensor gibt's natürlich zwei. Die Sensoren werden noch mit Schutzlack versiegelt.
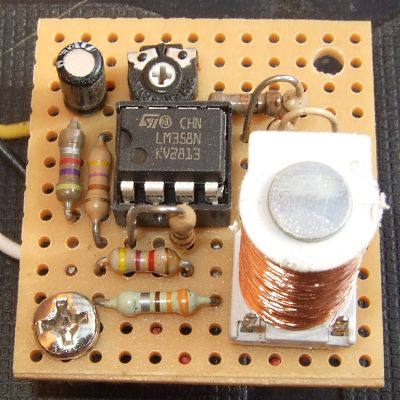
Ein Schleifensensor mit LM358N.